
User:Abbroad
Table of contents
• Introduction 1. What is robot? 2. Types of robots by application 3. Types of robots by locomotion 4. What is humanoid robots, (Androids)
• State of the art 1. History, Researches of Waseda university 2. Honda’s Asimo robot 3. Sony’s SDR-4X robot
• Problems
• Objectives
• Solutions 1. Researches of University of Alberta 2. Researches of University of Tokio • Conclusion
• References
Keywords
Robot, robotics, bipedal robot, humanoid robot, android, artificial muscles, artificial bones, SMA technology, pulley like muscles.
Introduction
Nowadays, robots are one of the most interesting research fields among information technologies. The cause of rapidly increasing interest in robotics is the enormously various applications of them.
Robot is a machine, that can control by itself because of having some artificial intelligence, or remotely. They have integrated circuits(microcontrollers), like brains, whichare the most dominant part of it.
Mostly robots are designated for handling the situations, those are difficult, dangerous, sometimes boring or maybe impossible for humans.
First coming to mind, when thinking of robots are human-like robots, and then industrial robots. But in fact, there are vast amount of kinds of robots, from nano-robots to huge industrial robots.
Consequently, for dividing robots into divisions by different types, the divisions should be deep enough to enclose all the robots. We can divide them into types in two ways: types by application and types by locomotion. This is the common way of making this partition. But there is another way: making these divisions together. In this kind of classification we consider both “What” and “How” the robot does what it supposed to do.
To divide robots by application, the answers of “What it does” need to be examined. Below is given some of the types of robots by application:
1. Types of robots by application
• Industrial robots: Are used in industrial environments, such as factories, plants and etc. In more cases, they are armed robots, using for holding, moving objects and so on, Fig 1(a).
• Domestic robots:
These are the robots used at home doing various of tasks. One of the obvious examples is vacuum cleaner, Fig 1(b).
• Medical robots: This kind of robots are used in med, both as medicine and medical instruments. Lately they are used for surgery as well, Fig 2(a).
• Military robots: Are used in military, including transportation robots, bomb disposal ones and so on, Fig 2(b).
• Entertainment robots: This is a large class. From little toy robots or running alarm clock to real heavyweights there are too many of this kind.
• Space robots: These are the robots used in cosmos, discovering another space objects and so on, Fig 3(a).
• Competition robots: Robots made for fun or for some competitions.Like sumo-bots, line follower machines and etc, Fig 3(a). [1]
This list can be much longer, but these are the main selected types considering their application.
But as you can see above information doesn’t give enough information about robot. Consider that you are told about a competition or hobby robot, but you are not aware of either it is two-legged, or four, or stationary robot. For this manner, the information about motion of the robot should be provided. So here comes types of robots by locomotion and kinematics.
Fig 1. Presents industrial and domestic robots Source:https://www.google.com/imghp?hl=en&tab=wi&ei=6DG-UrjoA4qPywPS6YGACA&ved=0CAQQqi4oAg
Fig 2. Demonstrates medical and military robots Source:https://www.google.com/imghp?hl=en&tab=wi&ei=6DG-UrjoA4qPywPS6YGACA&ved=0CAQQqi4oAg
Fig 3. Demonstrates space and competition robots Source:https://www.google.com/imghp?hl=en&tab=wi&ei=6DG-UrjoA4qPywPS6YGACA&ved=0CAQQqi4oAg
2. Types of robots by locomotion and kinematics
• Stationary robots: - Cartesian robots - Cylindrical robots - Spherical robots - Articulated robots (robotic arm)
• Wheeled robots: - Single wheel (ball) robots - Two-wheel robots - Three or more wheel robots
• Legged robots: - Bipedal (Humanoid) robots - Tripedal robots - Quadrupedal robots - Hexapod robots
• Swimming robots • Swarm robots • Flying robots • Mobile spherical robots[1]
As mentioned in the list above, one of the types is Humanoid (bipedal) robots, which is almost much more interesting to people to research than any others. Humanoid robots are designed like humans in body shape, some sensing, face mimics and so on. As you already understand, a humanoid robot has a torso, head, eyes, mouths, arms, legs generally. But sometimes, they produced in a shape of the upper half of human body.[2]
There are especial types of humanoid robots called androids which are aesthetically resemble of humans. Nearly all the features are the same as the rest of the humanoid robots. But in advance, they have very plasticbody cover just like flesh, which recalls skin. It is seen obviously on their faces when they talk. [3]
State of art
One of the first researchers in the field of humanoid robots is Waseda university of Japan. It was started in 1970. As a result of almost twenty years of researches they were successful designing one. But following these researches other universities of Japan also started to try to make humanoid robots. And they were being somehow successful. [4]
One of the today’s most successful humanoid robots is HONDA’s “Asimo” robot, shown in Fig 4. Modern Asimo weights 54kg and has height of 130cm. Asimo is able to run and walk, go up and down stairs, and fulfill object tracking, description and recognition.[5]
So far, Sony has also developed SDR-4X robot for the entertainment market, Fig 5. It can sing by producing voices with vibrators, dance, and also determine the distance between any object and itself. For this purpose, it is provided with two cameras by producers. [6]
Fig 5. Demonstrates Asimo robot by Honda Source:http://www.telegraph.co.uk/motoring/news/8876686/Honda-Asimo-robot-advances-in-leaps-and-bounds.html
Fig 5. Demonstrates SDR-4X robot by Sony Source:http://www.tribuneindia.com/2003/20030403/biz.htm
Problems
From what we all know, human body and mind are interconnected. Say, most of the parts of human body were designated as much complex and excellent as the mind requires them to be. It is the same mechanism for humanoid robots too. There have been lots of experiments to design a more human like robot, with much more flexibility, functionality, activity and so on. Nonetheless, the human body is very complex to duplicate on machines. Therefore there is not any robot the same as human, and this idea still remains the same. But as technology grows up the human beings are going to welcome their machine variant of duplicates.
Now the main challenge before humanoid researchers is how to mirror as much parts of human body; organs to humanoid robots. And in order to do it, sensors, tendons, cameras and other parts of robot have to work properly and more closely to the original organs that they duplicate. [5]
It is almost impossible to copy all the functionality of muscular-skeletal system to humanoid robot, which fully imitates the original one.[7] These are the main aspects that must be considered when duplicating human extremities: • An optimal force to feel, take and manage different objects(pencil, light bulb and so on.) • Capability and flexibility of motion of joints of bones • Feeling when touching(tactile senses) • Providing real human movements [8]
Objectives
The primary objective of this article is to provide you with the information about different solutions of problems above. There are a lot of solutions of those problems, but not all of them are successful. And many of them have remained as a project so far. Below you are going to see the two different solutions of University of Alberta (UoA) representing their “Robotic arm” project and University of Tokio (UoTokio) representing their “Kenshiro” robot (full body).
Solutions
Before switching to the solution of University of Alberta, I want to provide you with some information about ‘What is SMA technology?’. Shape memory alloy (SMA) is metal that can remember its initial state of shape. This material has an especial feature, that it can be modified by heating. [9]
SMAs have the ability to imitate human tendons well, they are not easy to break and they are very tight, that is why they used this technology in this Robotic arm. Consequently, they had success in creating more smooth and flexible motion of joints of bones.[8]
In Figure 6 shown the structure of the finger of the arm UoA developed. As can be seen here, the curved metal in the upper section of finger called bias wire is for holding the finger straight. And there is another wire (SMA wire) below the first one, managing motion of the finger to downwards. This happens by heating the SMA wire, and as cooling down it returns to its initial form, so it lengthened, and the finger opens upward. The heating process can be handling by special computer software, giving the wire constant electric current.[8]
Fig 6. Robotic finger structure by using SMA wires Source: http://webdocs.cs.ualberta.ca/~database/MEMS/sma_mems/muscle.html
Researchers of UoTokio generated new era with their new Kenshiro robot in 2012. They have made some modifications by adding few more motors and muscles to their latest Kojiro robot, produced in 2010. As shown in figure 7, this is the closest structure of artificial muscular-skeletal system so far.
This robot is like the body of 12 year old man, its overall height is about 160cm, and weights 50kg. [10]
Figure 8 illustrates all the including parts of the robot.
Kojiro, this time they have used planar muscles, instead of point-to-point connections. As a result they got more stable muscle system, Fig 9.
Fig 7. Kenshiro robot, underlying muscular-skeletal structure Source: http://spectrum.ieee.org/automaton/robotics/humanoids/kenshiro-robot-gets-new-muscles-and-bones
Fig 8. All main parts of Kenshiro robot.
Source: http://www.jsk.t.u-tokyo.ac.jp/research/kenshiro.html
The researchers also tried to duplicate force that effects muscles and joint speed. It is total output of power is 5 times greater than the previous robot, and thus it is able to do more complex motions than Kojiro. [10] As previously, the researchers have used pulley like, pneumatic muscles, but again a few but important modifications. Unlike
Fig 9. Structure of planar muscles
Source: http://spectrum.ieee.org/img/planarmuscle-1355193852042.png
{kind=link}
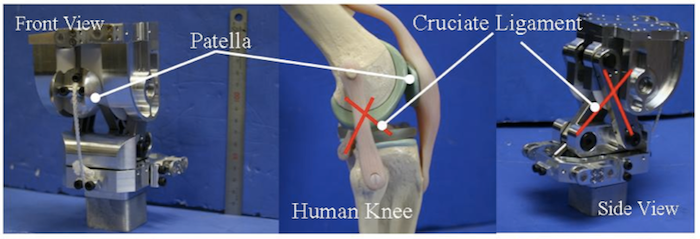
The bone structure has also been changed. They have used aluminum bones, they are lighter that previous metals used for bones, and more stable than 3D printing products, Fig 10. [10]
Fig 10. Structure bones as presentation of the knee Source: http://spectrum.ieee.org/img/patella-1355193890768.png
{kind=link}
Conclusion
As we have read from the article no matter how many attempts were made and how much investments are put, not all of them were successful. If we compare above to solutions, it is obvious that the solution which offered by researchers from UoTokio, is much more successful. And this is the most human like robot so far. Using planar muscles gave stability and reliability, and using aluminum bones made it lighter and more stable.
References
[1] URL:http://www.allonrobots.com/types-of-robots.html [2] URL:http://en.wikipedia.org/wiki/Humanoid_robot [3] URL:http://en.wikipedia.org/wiki/Android_(robot) [4] URL:http://www.humanoid.waseda.ac.jp/history.html [5] URL:http://www.cs.columbia.edu/~allen/F12/challenges_future.pdf [6] URL:http://www.sony.net/SonyInfo/News/Press_Archive/200203/02-0319E/ [7] URL: http://robots.stanford.edu/isrr-papers/draft/Takanishi-final.pdf [8] URL: http://webdocs.cs.ualberta.ca/~database/MEMS/sma_mems/muscle.html [9] URL: http://en.wikipedia.org/wiki/Shape-memory_alloy [10] URL: http://spectrum.ieee.org/automaton/robotics/humanoids/kenshiro-robot-gets-new-muscles-and-bones